Model Representation
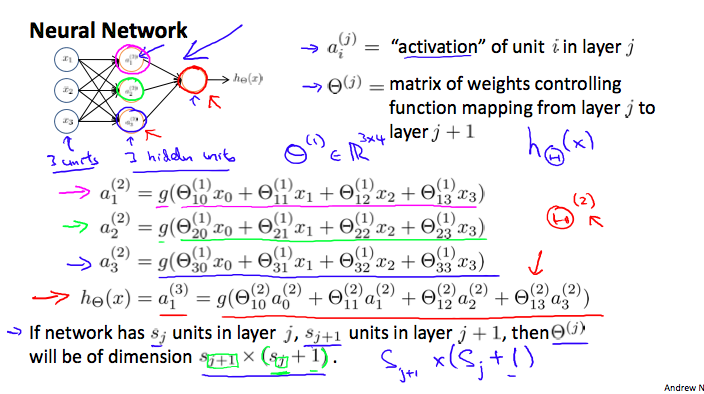
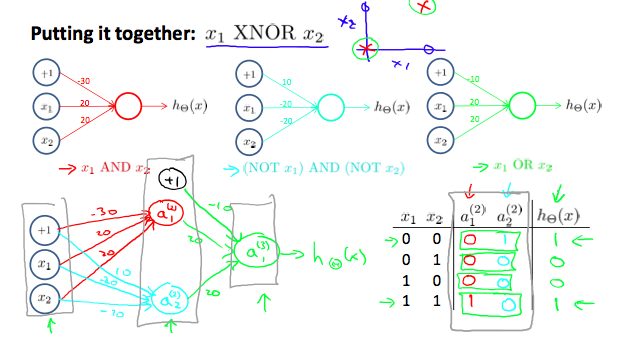
Example
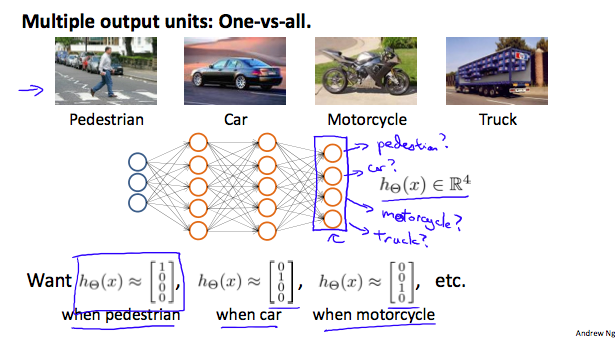
Multiclass Classification
Cost Funtion
$$J(\theta) = -\frac{1}{m}\sum^m{i=1}\sum^K{k=1}[-yk^{(i)} log(h\theta(x^{(i)}))k - (1-y_k^{(i)})log(1-h\theta(x^{(i)}))k] + \frac{\lambda}{2m} \sum^{L-1}{l=1} \sum^{sl}{i=1} \sum^{s{l+1}}{j=1} (\theta^{(l)}_{i, j})^2$$-
- Main: sum over all output nodes
- Regularization: adds up the squares of all the individual Θs in the entire network
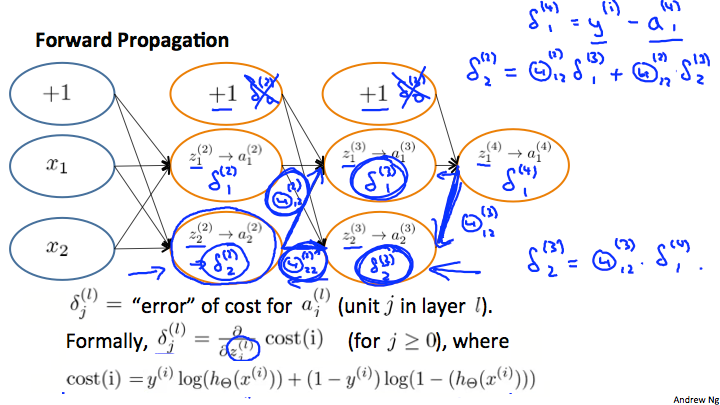
Backpropagation
Algorithm in neural networks to minimize the cost function.
$$ min_{\theta} J(\theta)
$$
i.e. trying to find the partial derivative:
$$ \frac{\partial}{\partial \theta_{i, j}^{(l)}} J(\theta)
$$
Algorithm
- Randomly initialize the weights
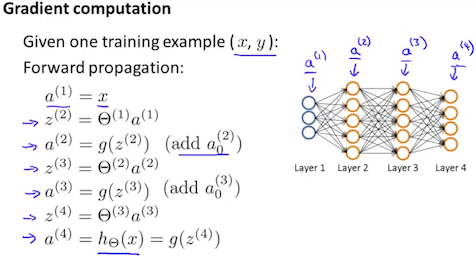
- Implement forward propagation to get $$h_{\theta}(x^{(i)})$$ for any $$x^{(i)}$$
- Use gradient descent or a built-in optimization function to minimize the cost function with the weights in theta
- Implement the cost function
- Use gradient checking to confirm that your backpropagation works
- Disable gradient checking
- Implement backpropagation to compute partial derivatives
- Compute errors $$\delta^{(l)}_{j} = \frac{\partial}{\partial z^{(l)}_j} cost(t)$$ of each node
- $$cost(t) = y^{(t)} log(h\theta(x^{(t)})) + (1-y^{(t)})log(1-h\theta(x^{(t)}))$$
- Compute errors $$\delta^{(l)}_{j} = \frac{\partial}{\partial z^{(l)}_j} cost(t)$$ of each node
Training Set
$${(x^{1}, y^{1}), ..., (x^{m}, y^{m})}$$$${(x^{(1)}, y^{(1)}), ..., (x^{(m)}, y^{(m)})}$$
Steps
- Set $$\Delta^{(l)}_{i, j} := 0$$ for all $$i, j, l$$
For training example
t = 1tom:- Set $$a^{(1)} = x^{(t)}$$
For forward layers
l = 1toL:$$a^{(l)}$$ = forward propagation
Compute $$\delta^{(L)} = a^{(L)} - y^{(t)}$$
For backward layers
l = L-1to2:- $$\delta^{(l)} = (\theta^{(l)})^T \delta^{(l+1)} \odot g'(z^{(l)})$$ , $$g'(z^{(l)}) = a^{(l)} \odot (1 - a^{(l)})$$
$$\Delta^{(l)}{i, j} := \Delta^{(l)}{i, j} + \delta^{(l+1)} (a^{(l)})^T$$
Accumulator
$$ \begin{aligned} D^{(l)}{i, j} &:= \frac{1}{m} (\Delta^{(l)}{i, j} + \lambda \theta^{(l)}{i, j}) &\text{ if } j \ne 0\ &:= \frac{1}{m} (\Delta^{(l)}{i, j}) &\text{ if } j = 0\ \frac{\partial}{\partial \theta^{(l)}{i, j}} J(\theta) &:= D^{(l)}{i, j} \end{aligned}
$$
Implementation
Gradient Checking
$$ \frac{\partial}{\partial \theta} J(\theta) \approx \frac{J(\theta + \epsilon) - J(\theta - \epsilon)}{2\epsilon}\ \frac{\partial}{\partial \theta_j} J(\theta) \approx \frac{J(\theta_1, ..., \theta_j + \epsilon, ..., \theta_n) - J(\theta_1, ..., \theta_j - \epsilon, ..., \theta_n)}{2\epsilon}
$$
Check if $$deltaVector \approx gradApprox$$.
Random Initialization
Initialize $$\theta^{(l)}_{i, j}$$ to a random value within $$[-\epsilon, \epsilon]$$.
Good choice of $$\epsilon = \frac{\sqrt{6}}{\sqrt{L{in} + L{out}}}$$ where $$L{in} = s_l$$ and $$L{out} = s_{l+1}$$
Architecture
- Number of input units = dimension of features $$x^{(i)}$$
- Number of output units = number of classes
- Number of hidden units per layer = usually more the better (must balance with cost of computation as it increases with more hidden units)
- Defaults: 1 hidden layer. If more than 1, it is recommended to have the same number of units in every hidden layer